Publié par Philippe le 31 Mar 2008 at 10:18
Weekend intégration (Part 2)
L’électrononique et le soft communiquent
Voilà un dimanche qui a été bien occupé…
- La bonne nouvelle, c’est que le robot roule, et roule plutôt bien
- La mauvaise, c’est que le temps passe vite.
Le début de la journée nous a permis de déboguer la communication entre les cartes. Pas facile, parce que l’on passe par beaucoup de couches logicielles, de cables et d’électronique entre l’utilisateur qui veut faire avancer le robot et les moteurs de propulsion :
Ordinateur -> USB -> FTDI232 -> Série -> Carte Main -> I²C > Carte PWM -> Signal PWM -> Carte H bridge -> Moteurs
Après correction des bugs en question, un peu partout, la communication était fiable, et le robot ne bougeait que quand on lui demandait !
La méca
Pendant ce temps la, l’équipe méca nous a assemblé un magnifique carrousel, sans jeu, sans frottement ! De l’horlogerie presque 😉
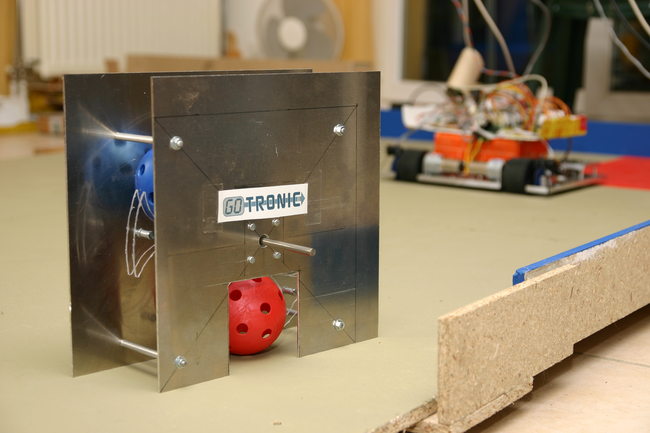
La pièce mobile est faite de 2 plaques de plexi séparées par des entretoises afin de la rigidifier. On voit les paliers supportant les roulements sur les photos suivantes:

Et en plus gros: ( La macro, c’est bien 😉 )
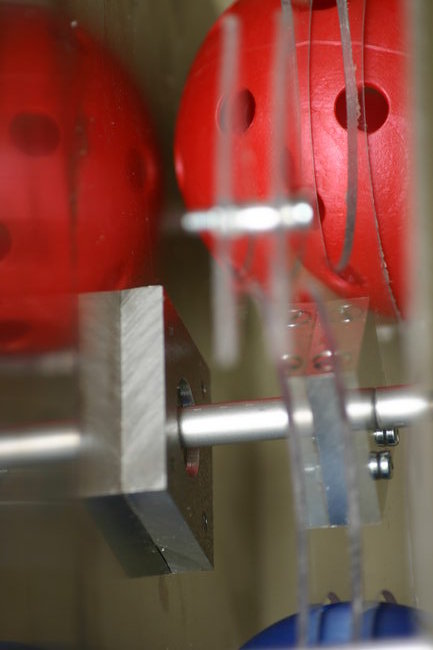
Le père du carrousel explique ici son fonctionnement:
Une courroie et 2 poulies sont pour l’instant coincées dans une faille spacio-temporelle entre le fournisseur et nous … Elles viendront animer ce carrousel. Si le robot roule, c’est bien grâce à ces encodeurs, provenant d’une très vieille souris :
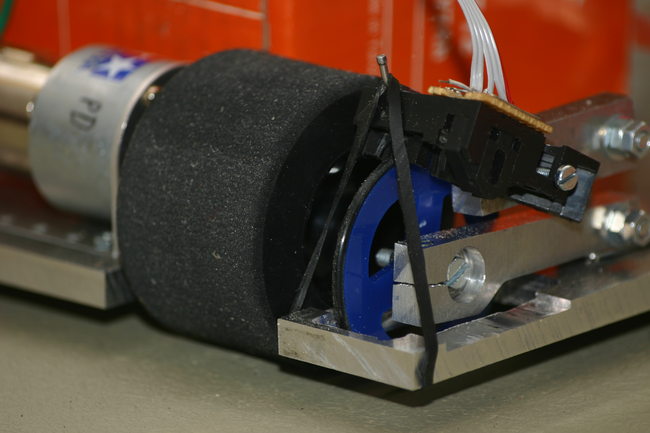
La roue bleue fait la liaison entre le sol et l’encodeur au dessus. Les roues en mousse sont celles de propulsion, montées sur les moto-réducteurs Tamiya.
Pause poule
Et si on apprenait à une poule à mettre les balles dans les conteneurs ?


Comme on le voit sur la photo, l’algorithme de vision de la poule n’est pas adapté aux balles … Bon, on programme le robot alors !
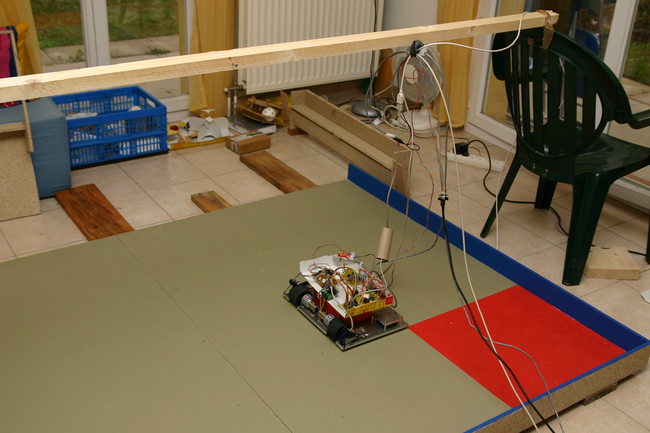
Comment déboguer un robot ?
Ce n’est pas simple ! Pour l’instant, il y a plusieurs connections entre l’ordi et le robot (USB et RS232) Tant que la communication n’était pas fiable, il fallait toujours quelqu’un prêt à débrancher la batterie pour ne pas abîmer ni la table, ni le robot. Il fallait aussi tenir les câbles en l’air pour ne pas que le robot roule dessus… C’est normalement le role des plus oisifs dans les équipes composées d’un grand nombre de personnes ;-). A 3, c’est une perte de temps. La solution est en partie sur la photo suivante. Il manque la photo de l’arret d’urgence, qui était posé à coté de l’ordi, et qui permettait d’éteindre le robot à distance. De cette facon, on pouvait vraiment se concentrer sur le code, sans perdre de temps.
Et voici une vidéo d’un carré … bien raté !
Bilan
Tout comme la Nasa, nous avons eu aussi notre bug de spec. Le soft attendait les coordonnées en millimètre, l’élec lui a fournit en nombre d’impulsions d’encodeurs … Notre soirée s’est achevée là, sur un bon repas bien mérité.
Encore quelques weekends comme celui-là et nous seront près pour la coupe !
Laisser un commentaire