Publié par Philippe le 05 Mar 2008 at 10:01
Le vrai robot roule
C’est autour de cannellonis maison (merci Isa !) que nous nous sommes retrouvés pour assembler la méca, l’élec et l’info. Après quelques soudures (fils trop courts …), quelques recompilations (#define) et derniers coups de lime, le robot a roulé !
Voici la photo de ce que nous avons ajourd’hui en version définitive :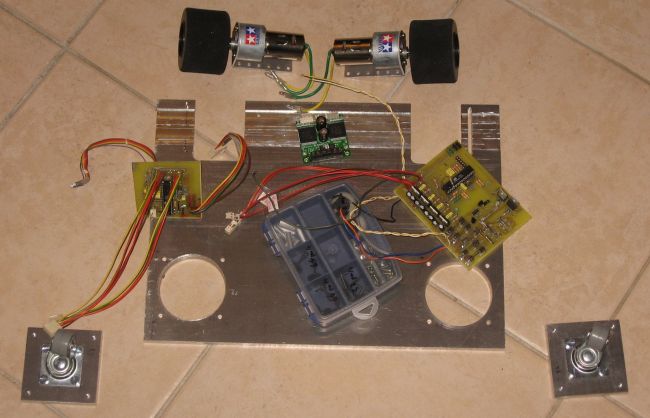
Le chassis en alu de 8mm est INDÉFORMABLE ! Les moteurs Tamiya semblent assez puissants et rapides pour déplacer les 2 kg du chassis. Les roues en mousse dense assurent un très bon contact avec le sol. Les cartes électroniques ont choisi de communiquer avec nous en allumant des LEDs plutôt qu’avec des signaux de fumée, et je les en remercie ! La carte pont en H qui vient de chez Pololu ne chauffe absolument pas, et ne semble pas propager trop de parasites. En tout cas beaucoup moins que la version faite « à la main » avec des MOSFET discrets.
Le tout assemblé donne ceci :
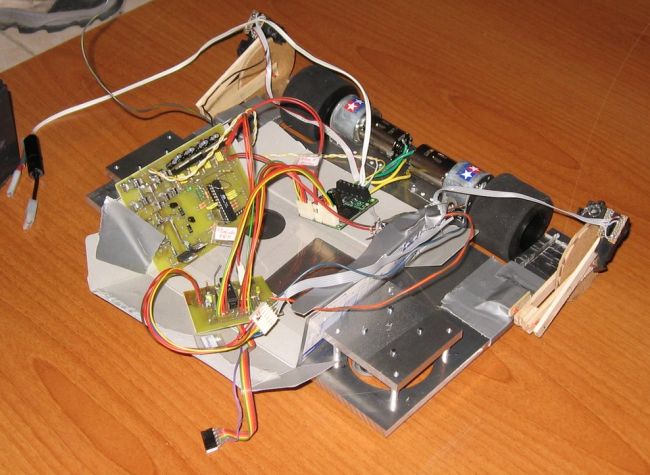
Et ca a roulé ! Bon, il reste à assembler les encodeurs de souris de façon définitive et régler quelques paramètres du filtre PID pour que l’on ai une base fiable.
Voila une bonne étape de faite !
Laisser un commentaire