Publié par Philippe le 16 Jan 2008 at 10:07
J+16 après la validation de l’avant projet,
Ou en somme nous ?
Etat des lieux :
- Nous avons une bonne idée de comment ramasser les balles et les stocker dans le robot. Un prototype en bois/pistocolle est en cours de réalisation, pour vérifier si les balles vont se coincer ou pas !
- Un prototype de robot qui roule. Il a une carte de puissance avec des IRF540, un atmel at90s2313 et une vieille souris à boule dont les encodeurs ont été récupérés et montés sur des roues indépendantes de la propulsion. Il bouge :
La liaison UART avec le PC transmet régulièrement la position des roues et la puissance envoyée aux moteurs. Python et matplotlib ont donné la courbe suivante :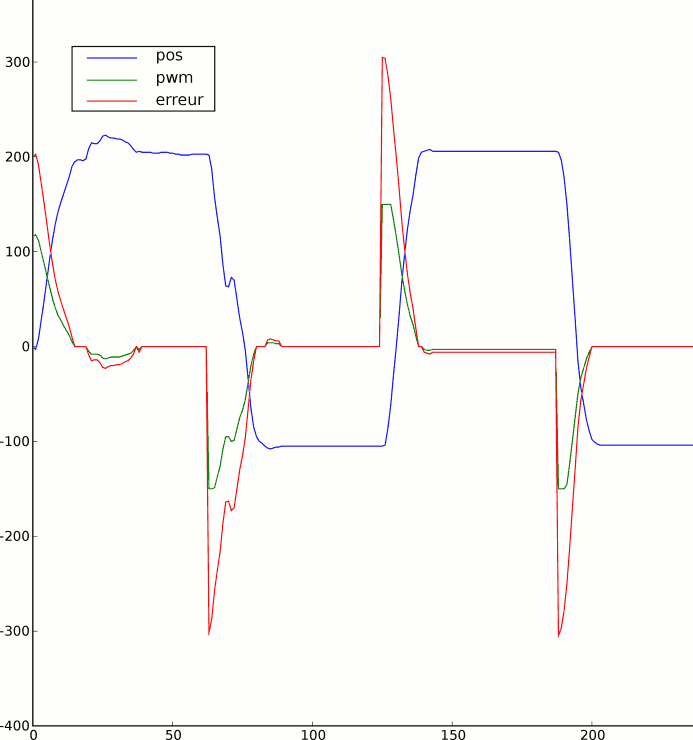 C’est un filtre PI pour l’instant, dont la consigne change de -100 à 200. Il fait bien son travail et corrige la position assez rapidement. Il a fallu plusieurs essais pour trouver des coefficients stables 🙂
C’est un filtre PI pour l’instant, dont la consigne change de -100 à 200. Il fait bien son travail et corrige la position assez rapidement. Il a fallu plusieurs essais pour trouver des coefficients stables 🙂
- Une moitié de table est complètement terminée, avec le distributeur horizontal,
- Et la webcam commence à voir des cercles :
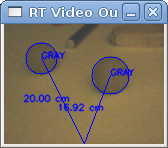
En bonus, on obtient la distance, et la couleur ! Impressionnant.
Buvons une bière pour fêter ces progrès !
Laisser un commentaire